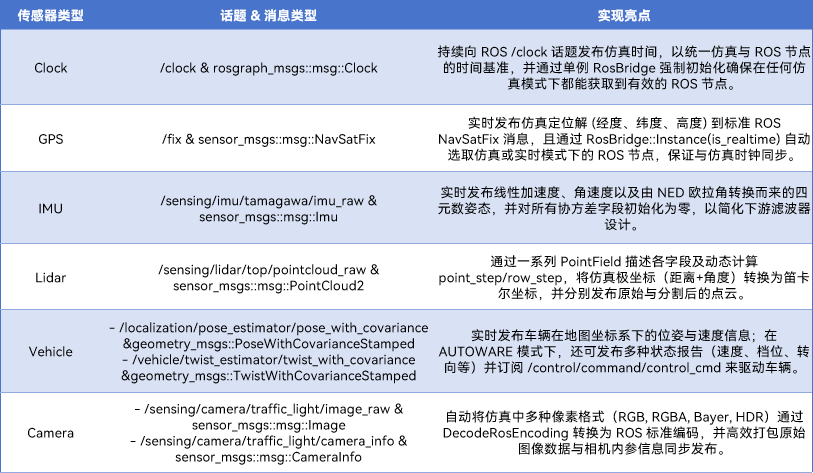
在自动驾驶与机器人仿真领域,传感器数据的高效交互是连接虚拟仿真与实际系统的关键纽带。ROS(Robot Operating System) 作为行业通用的机器人操作系统,其传感器数据交互机制直接影响仿真的真实性与系统集成的便捷性。 本文基于对aiSim 中各类 ROS 传感器(时钟、GPS、IMU、激光雷达、车辆、相机)模块的源码学习,梳理了它们的共性架构...
AEO互认+电子证书 海关总署多举措畅通对非通关
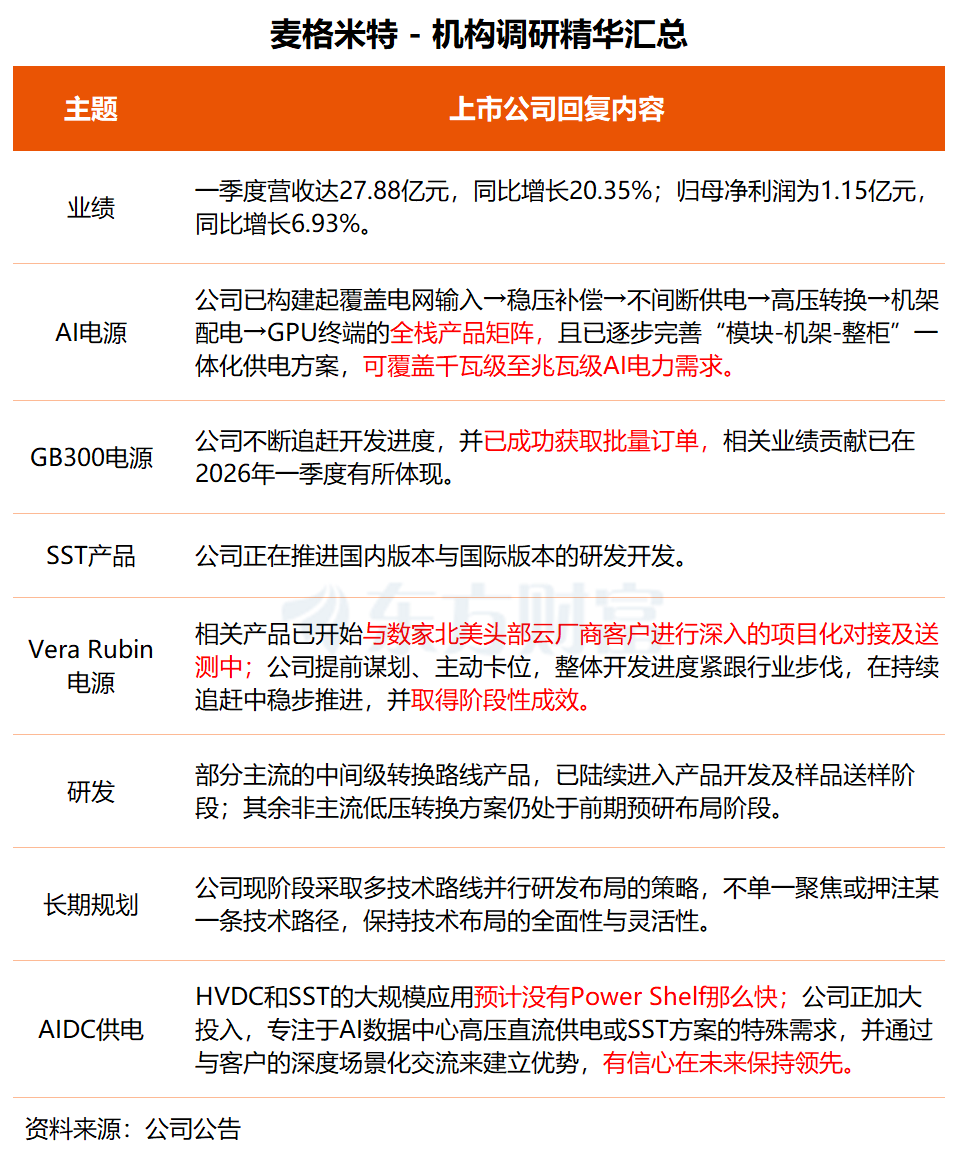
机构调研丨英伟达概念+储能+HVDC 这家公司已获GB300电源批量订单 Vera Rubin相关产品已开启送测
量产良率99.5%!电动工具无刷电机驱动方案,拒绝批量翻车
从传感器到主机:高分辨率、高吞吐成像的系统架构考量
智慧景区能耗监测管理系统方案
 环贸财神
2025-10-26
环贸财神
2025-10-26