在嵌入式开发领域,我们常遇到这样的场景:花了三天编译的系统镜像,启动后却发现摄像头无法工作;明明配置了SSH服务,却始终连不上设备;甚至有时候,一句"构建失败"的报错能让整个团队卡壳半天。
如果你也曾被这些问题困扰,那今天这篇文章值得深读。我们将通过分析一个真实的嵌入式系统构建脚本,带你看清系统从0到1的诞生过程,更重要的是——学会在调试时抓住问题的"七寸"。
一、这到底是个什么脚本?
先看脚本的核心定位:这是一个基于Debian的嵌入式系统构建脚本,负责将基础镜像、驱动模块、应用组件"缝合"成可直接烧录的系统镜像。简单说,它是系统的"接生婆",从基础镜像到最终可用的系统,全流程都由它掌控。
我们可以把它的工作拆解成5个关键阶段:
1.环境初始化:定好"施工图纸"
TARGET_ROOTFS_DIR="binary"# 目标根文件系统目录case"${ARCH:-$1}"in # 处理架构参数,支持armhf和arm64arm|arm32|armhf)ARCH=armhf;;*)ARCH=arm64;;esacVERSION=${VERSION:-"release"}# 默认为release版本,支持debug模式
这部分就像施工前的"图纸设计":明确构建目标(根目录位置)、硬件适配(架构选择)、功能模式(release/debug)。调试时第一个要检查的就是这里——如果架构选错,后续所有驱动和软件都会"水土不服"。
2.基础镜像处理:打好"地基"
# 检查基础镜像是否存在if[ ! -e linaro-bullseye-alip-*.tar.gz];thenecho"�33[36m Run mk-base-debian.sh first �33[0m"exit -1fi# 解压基础镜像sudo tar -xpf linaro-bullseye-alip-*.tar.gz
基础镜像是系统的"地基",如果这一步出错(比如镜像缺失、解压失败),后续所有操作都是空谈。调试时若遇到"文件不存在"的报错,先检查基础镜像是否正确生成(脚本提示要先运行mk-base-debian.sh)。
3.组件集成:搭建"主体结构"
这部分是脚本的核心,像搭积木一样往基础系统里填充内容:
# 复制架构相关的软件包sudocp-rpf packages/$ARCH/*$TARGET_ROOTFS_DIR/packages# 复制系统配置文件(overlay层)sudocp-rpf overlay/*$TARGET_ROOTFS_DIR/# 复制网卡驱动模块sudocp../kernel/drivers/net/ethernet/realtek/r8125.ko$TARGET_ROOTFS_DIR/usr/lib/modules/
这里藏着很多调试关键点:
•如果某个硬件(比如网卡)无法工作,先检查驱动文件(r8125.ko)是否正确复制
•如果系统配置异常(比如启动脚本丢失),大概率是overlay目录的文件没复制完整
•不同架构(armhf/arm64)的软件包存在差异,若混用会导致"无法安装"的报错
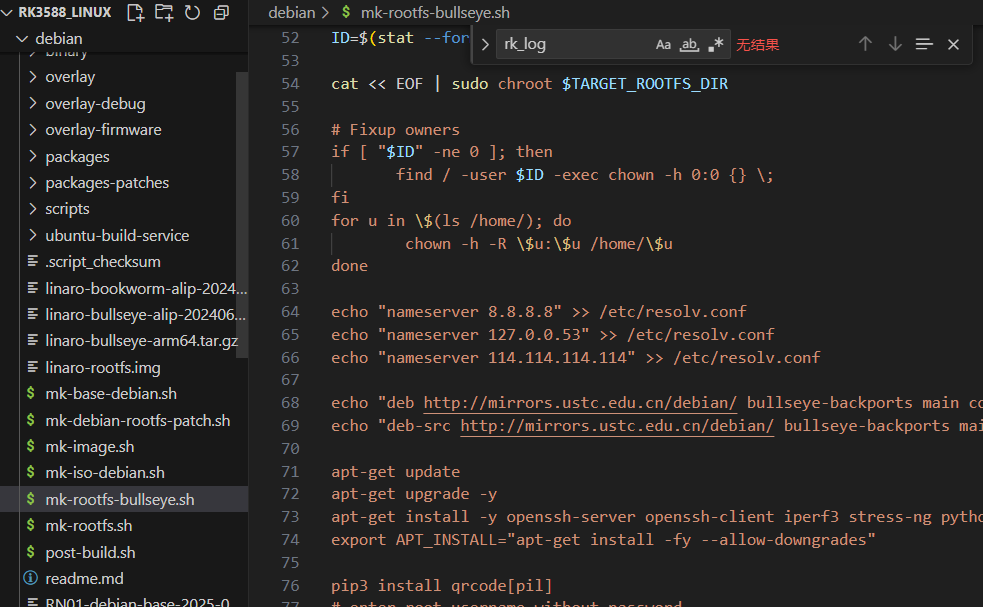
4.系统配置:"精装修"阶段
通过chroot进入目标根文件系统后,脚本开始执行一系列"精装修"操作:
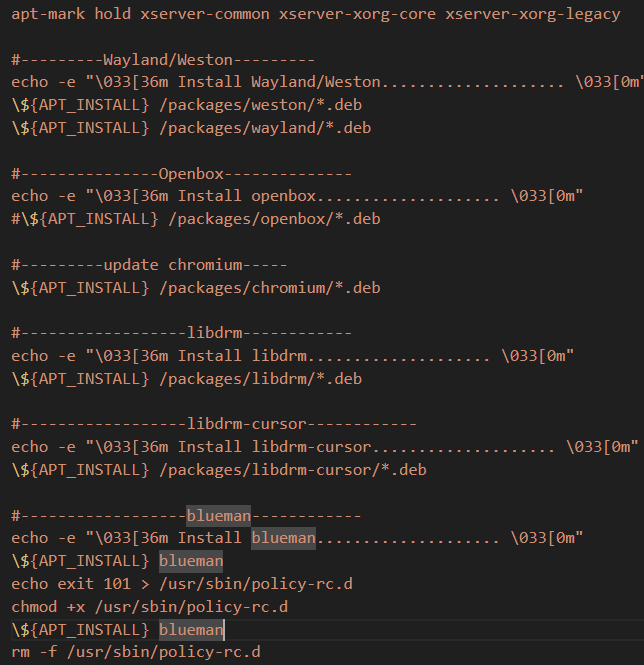
# 设置DNS,解决联网问题echo"nameserver 8.8.8.8">> /etc/resolv.conf# 安装核心工具(SSH、性能测试工具等)apt-get install -y openssh-server iperf3 stress-ng# 配置串口登录sed -i"s~(^ExecStart=.*)~# 1nExecStart=-/bin/sh -c '/bin/bash -l /dev/%I 2>&1'~"/usr/lib/systemd/system/serial-getty@.service# 安装硬件相关组件(视频、相机、显示服务等)${APT_INSTALL}gstreamer1.0-plugins-bad # 视频处理${APT_INSTALL}cheese v4l-utils # 相机支持${APT_INSTALL}/packages/xserver/*.deb # 显示服务
这部分是调试的重灾区,常见问题包括:
•网络不通:检查resolv.conf是否正确配置,软件源是否可用
•SSH连不上:查看openssh-server是否安装,服务是否启用
•硬件功能失效(如相机打不开):检查对应的包(cheese、v4l-utils)是否安装成功
•启动后黑屏:可能是xserver或weston显示服务配置有误
5.清理与打包:"竣工交房"
# 清理缓存和临时文件rm-rf /var/lib/apt/lists/*rm-rf /var/cache/# 打包成最终镜像sudo tar zcf RN01-debian-base-$(date+%Y-%m-%d).tar.gz$TARGET_ROOTFS_DIR
清理步骤能减小镜像体积,如果不清除,镜像会比较大,但如果清理过度(比如误删必要文件),会导致系统启动失败。如果镜像能生成但无法启动,要检查这里是否误删了关键组件。
二、调试时盯着这个脚本,到底能解决什么问题?
很多开发者调试时习惯"头痛医头":摄像头不行就只查摄像头驱动,网络不通就只看网卡配置。但实际上,嵌入式系统的问题往往是"牵一发而动全身",而这个构建脚本就是串联所有环节的"主线"。
关注它的3个核心价值:
1.快速定位"失败环节"
脚本的每一步都有明确输出(比如echo -e "�33[36m Install camera... �33[0m"),构建失败时,最后出现的提示信息就是"案发现场"。
比如看到"Install camera..."后报错,说明相机相关的包安装失败,此时应检查:
•packages目录下的相机相关deb包是否存在
•包的架构是否与目标系统匹配(armhf/arm64不能混)
•依赖是否满足(可以在chroot环境手动执行apt安装命令排查)
2.理解系统"依赖关系"
嵌入式系统的组件依赖极其复杂:比如相机工作不仅需要相机驱动,还依赖视频框架(gstreamer)、显示服务(xserver)、硬件加速库(mpp)。
这个脚本清晰展示了依赖链条:先安装基础系统→再装视频框架→然后装相机应用→最后配置显示服务。当某个功能失效时,顺着脚本的安装顺序倒推,能快速找到缺失的依赖。
3.排查"环境配置"问题
很多时候,相同的代码在A电脑能构建成功,在B电脑却失败,问题往往出在环境差异。这个脚本将所有构建步骤"代码化",让环境配置变得可追溯:
•是不是忘了复制某个overlay配置文件?
•内核驱动的路径是否正确(脚本中是../kernel/drivers/...)?
•debug版本需要的额外包(如glmark2)是否在VERSION=debug时才安装?
三、给开发者的3个调试技巧
1.善用echo输出中间变量
在关键步骤前增加输出,比如在复制驱动前加echo "Copying r8125.ko from $(pwd)/../kernel/...",确认路径是否正确。
2.保留chroot环境
脚本最后会退出chroot环境,调试时可以注释掉清理和打包步骤,手动进入chroot $TARGET_ROOTFS_DIR,逐条执行命令排查问题。
3.对比成功与失败的构建日志
保存一次成功构建的完整日志,当后续构建失败时,用diff命令对比日志,快速定位差异点。
写在最后
嵌入式系统构建就像搭积木,而这个脚本就是积木的"组装说明书"。读懂它,你不仅能快速解决眼前的调试问题,更能理解整个系统的"骨骼架构"——这才是从"解决问题"到"看透本质"的关键一跃。
下次遇到系统构建问题时,不妨先打开这个脚本,顺着它的步骤一步步排查。很多时候,答案就藏在那些看似平凡的cp、apt-get和sed命令里。
(如果觉得有用,欢迎转发给你的开发伙伴~)