Titan-RA8P1板载32MB的HyperRAM用于扩展内存空间。
https://club.rt-thread.org/ask/article/d1cedfd3e9ece158.html
上面的帖子中介绍如何在e2sutido中结合RT-Thread的代码仓库(使用的是最新的RT-Thread版本),在e2stduio中调试和下载RT-Thread工程。配置的过程繁琐,如何进行工程复用?可以利用e2studio的工程导出功能导出e2studio工程。再利用e2studio中的”重命名并导入工程”的功能实现工程的复用。
如果需要切换FSP版本或者RT-Thread版本,则需要重新制作一个e2studio工程模板。本文介绍使用RT-Thread V5.1版本的代码和FSP6.2.0创建e2studio工程模板,并使用e2studio的重命名导入功能,实现工程复用。
目录
RT-Thread代码添加
创建e2studio工程
添加HyperRAM
好物直达
1 RT-Thread代码添加
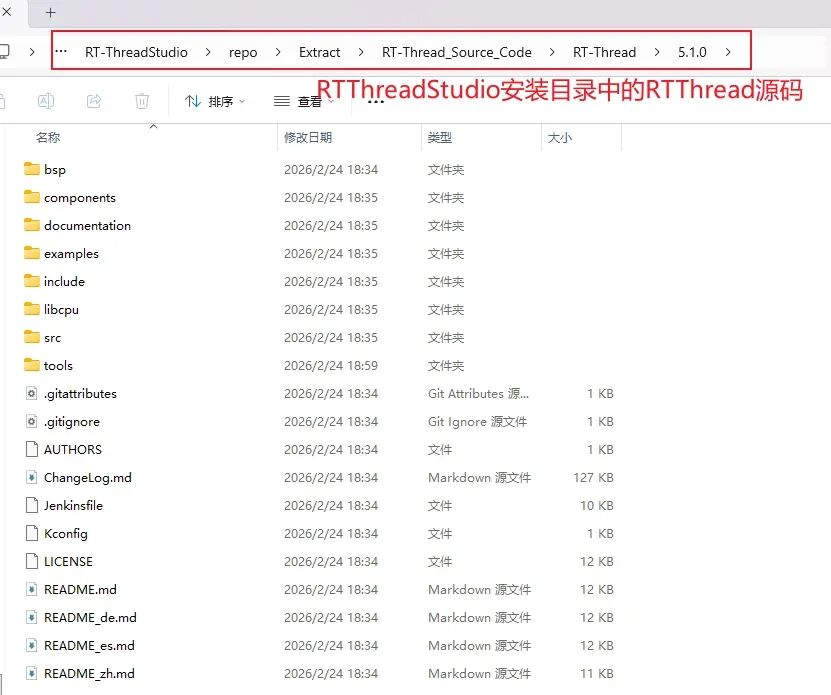
在RT-Thread Studio安装RT-Thread v5.1,并从安装路径中使用RT-Thread代码;
或者RT-Thread Github获取v5.1的代码。
https://github.com/RT-Thread/rt-thread/releases/tag/v5.1.0
这里将RT-Thread v5.1的源码复制到rt-thread_5_1文件夹中,并和e2studio工程保持简单的相对路径。
2 创建e2studio工程
实现串口控制台和GPIO功能,实现RT-Thread功能中最小的部分作为工程模板。
2.1 FSP工程建设
在工程界面选择FSP6.2.0和Titan-Board对应的MCU芯片型号,工程的编译器选择GCC。
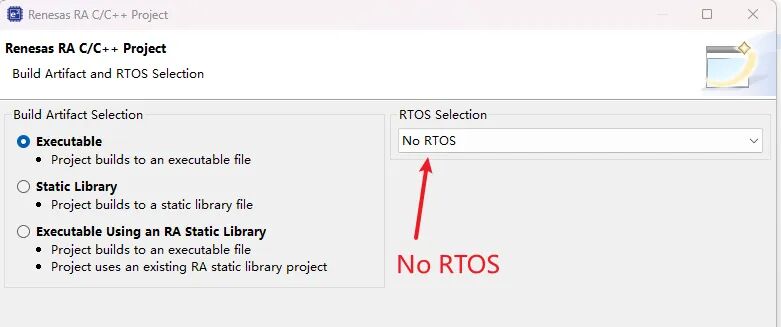
在RTOS界面选择”NO RTOS”,其余选项选择默认即可。
根据原理图,串口的引脚如下:
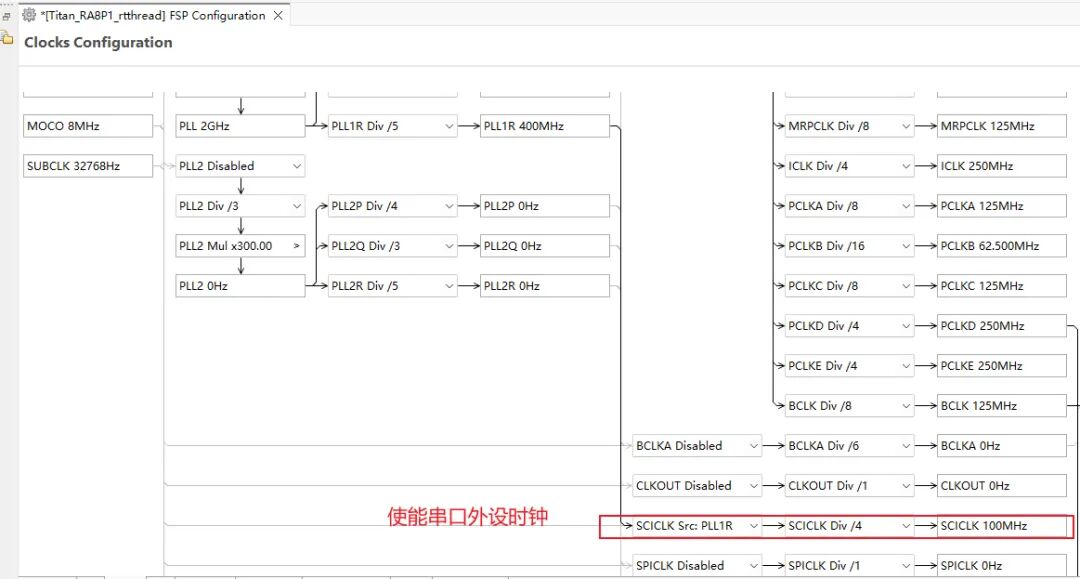
在clock界面中使能SCI 外设的时钟。
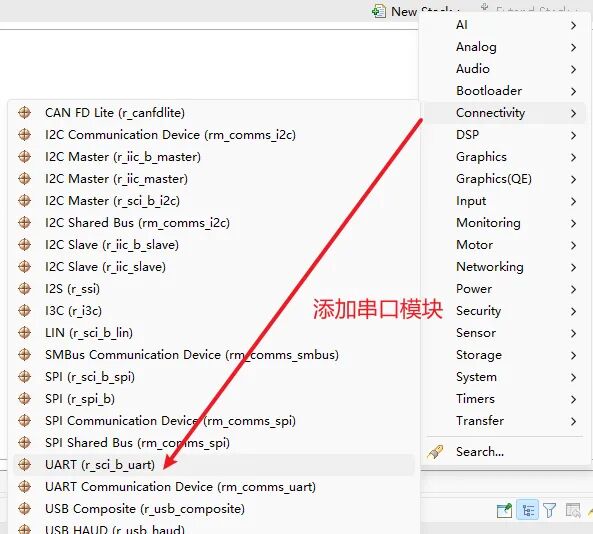
在FSP Configurator中的Stacks界面中添加串口模块。
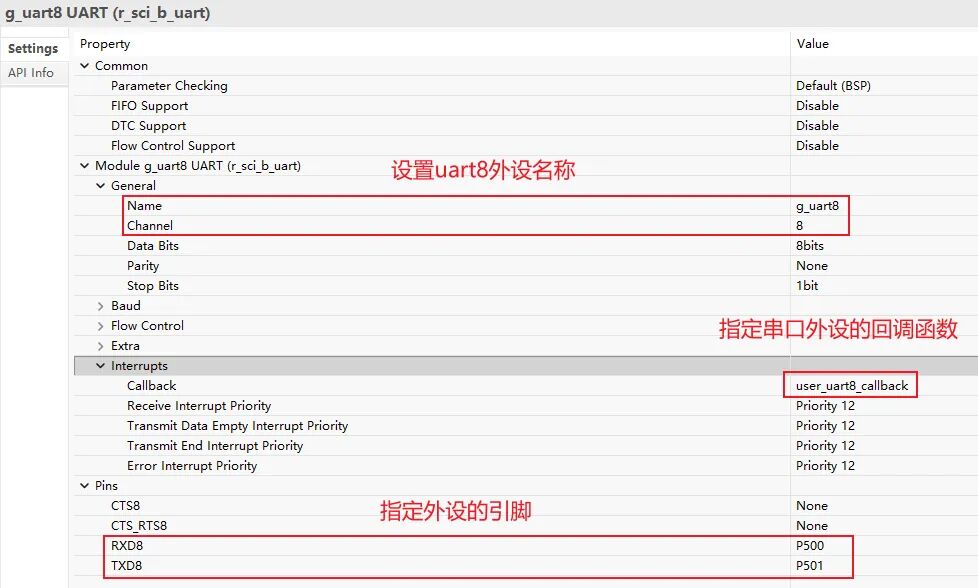
同时设置串口模块的参数如下:
保存并生成代码。
2.2 添加RT-Thread BSP工程中的文件
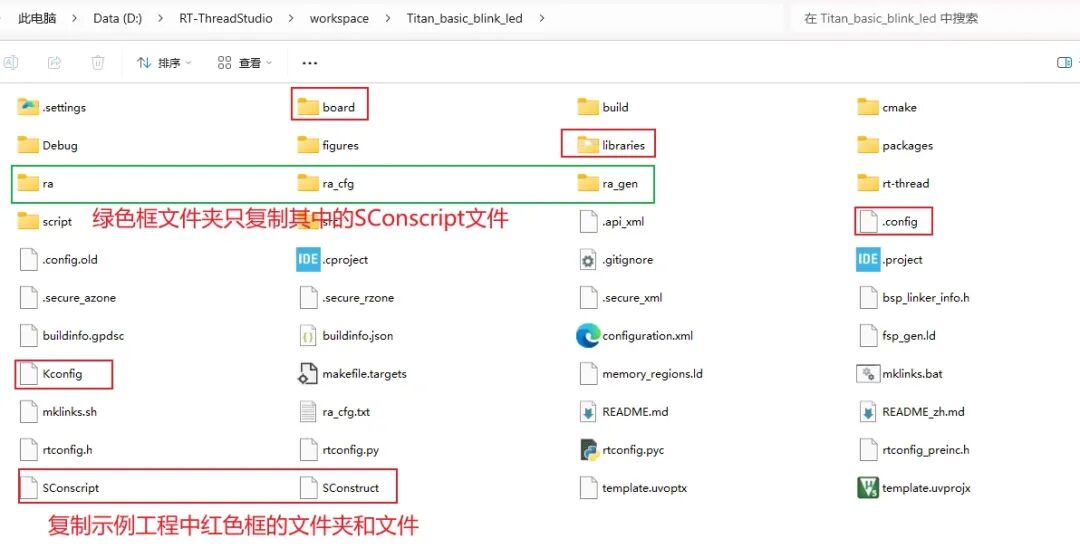
官方代码仓库中对Titan RA8P1开发板进行适配,复制其中的部分文件到工程文件夹,用于RT-Thread代码的配置、Scons输出CMake信息、开发板外设和软件组件适配等;
通过链接文件夹的方式添加RT-Thread源码到工程中
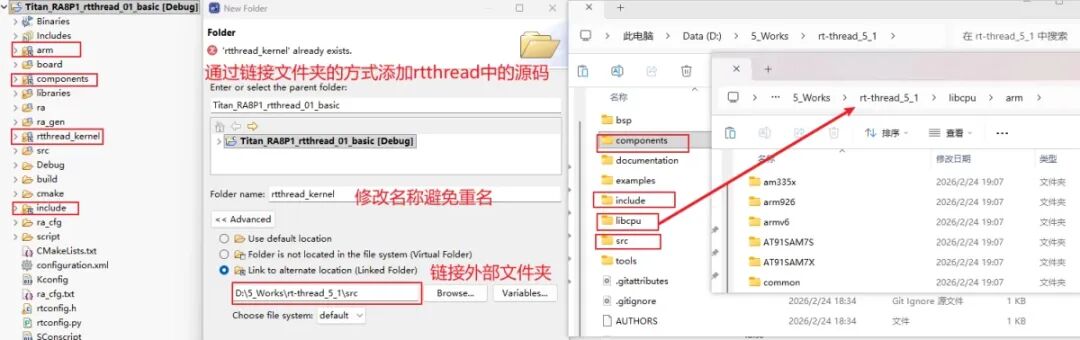
由于工程和RT-Thread的相对路径发生变更,需要修改顶层KConfig文件中变量。
mainmenu"RT-Thread Configuration"config BSP_DIR string option env="BSP_ROOT" default"."config RTT_DIR string option env="RTT_ROOT" default"../../rt-thread_5_1"# you can change the RTT_ROOT default"../.."to your rtthread_root,# example : default"F:/git_repositories/rt-thread"config PKGS_DIR string option env="PKGS_ROOT" default"packages"config ENV_DIR string option env="ENV_ROOT" default"/"source"$RTT_DIR/Kconfig"source"$PKGS_DIR/Kconfig"source"libraries/Kconfig"source"$BSP_DIR/board/Kconfig"
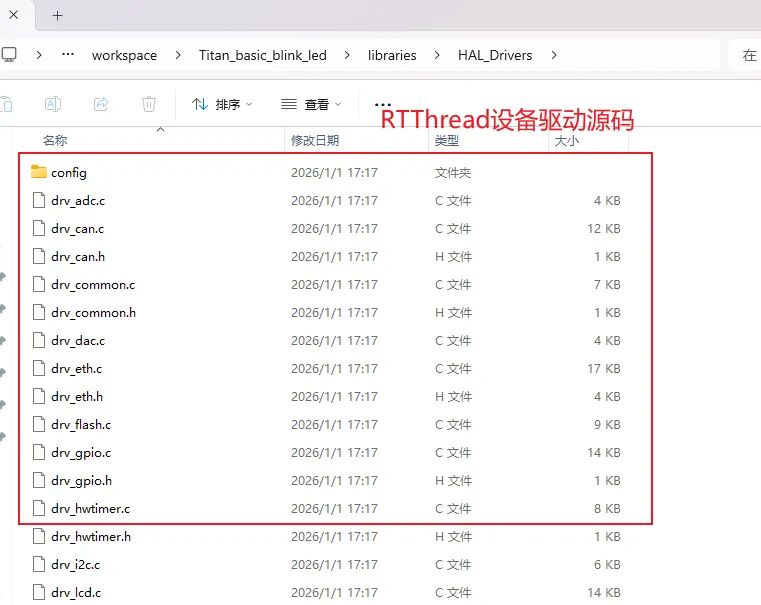
复制librarys/HAL_Drivers中的部分文件到工程目录中并保持目录结构,用于支持开发板的外设。
工程为保持精简,board文件夹中的内容删除多余的文件,保留图中的文件。删除的文件可以后续根据功能添加。
其中的KConfig文件修改为以下内容
mainmenu"RT-Thread Configuration"config BSP_DIR string option env="BSP_ROOT" default"."config RTT_DIR string option env="RTT_ROOT" default"../../rt-thread_5_1"# you can change the RTT_ROOT default"../.."to your rtthread_root,# example : default"F:/git_repositories/rt-thread"config PKGS_DIR string option env="PKGS_ROOT" default"packages"config ENV_DIR string option env="ENV_ROOT" default"/"source"$RTT_DIR/Kconfig"source"$PKGS_DIR/Kconfig"source"libraries/Kconfig"source"$BSP_DIR/board/Kconfig"
RT-Tread Studio工程中的SConstruct脚本中的RT-Thread源码路径需要根据文件路径修改,用于后续使用scons --target=cmake指令获取编译的头文件包含路径和源文件索引信息。
ifos.path.exists('rt-thread'): RTT_ROOT = os.path.normpath(os.getcwd() +'/rt-thread')else: RTT_ROOT = os.path.normpath(os.getcwd() +'../../../rt-thread_5_1')
在工程文件夹中打开RT-Thread提供的env控制台,输入menuconfig指令进入代码配置界面,确认KConfig文件可以正确解析。
官方示例程序提供串口和GPIO控制,无需修改,直接使用即可。如果使用官方的BSP模板进行适配,可以参考之前的帖子进行移植。
https://club.rt-thread.org/ask/article/d1cedfd3e9ece158.html
2.3 e2studio工程调整
首先需要修改工程编译器的参数,修改FPU Type为fpv5-sp-d16,Other target flags的参数设置为-march=armv8.1 -m.main+mve.fp+fp.dp
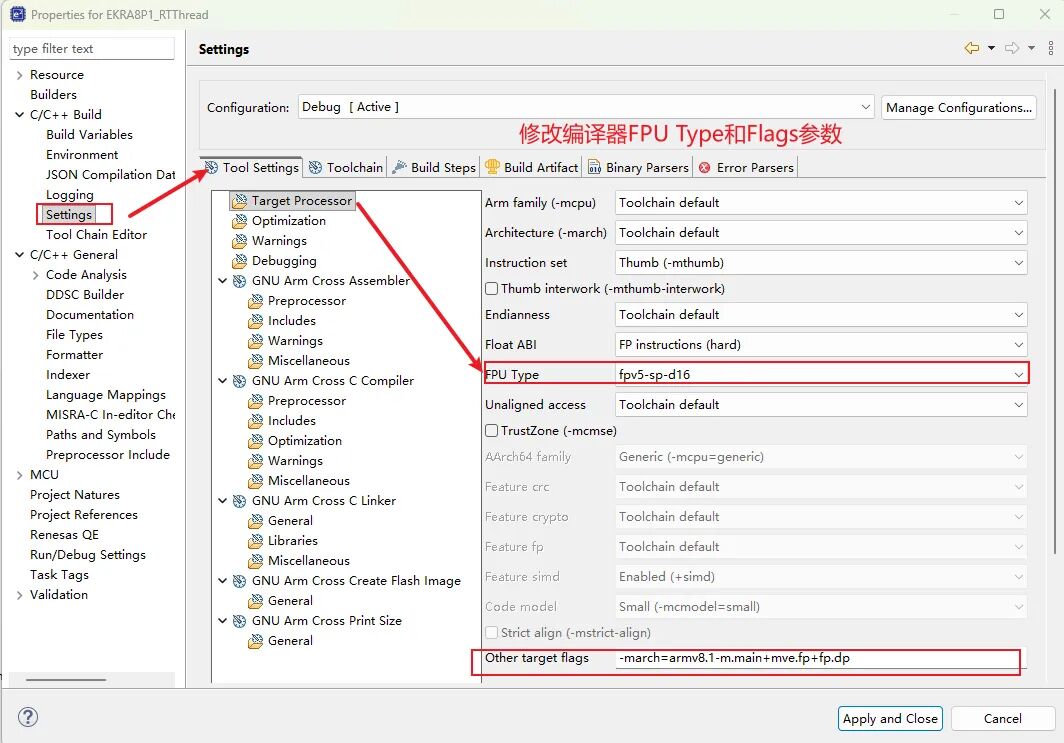
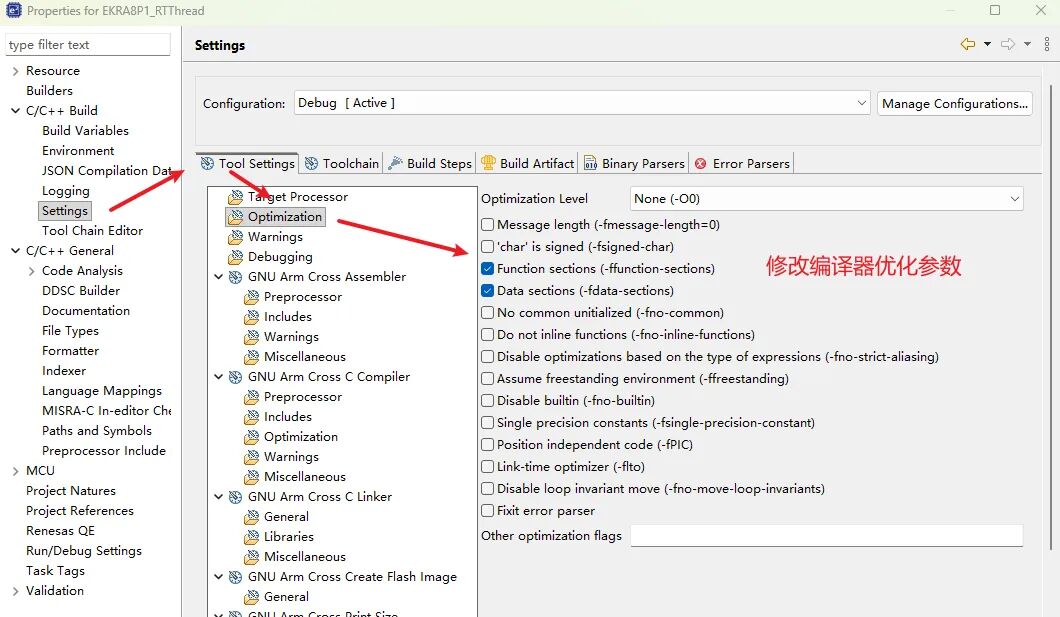
同时修改编译器的优化参数如下。
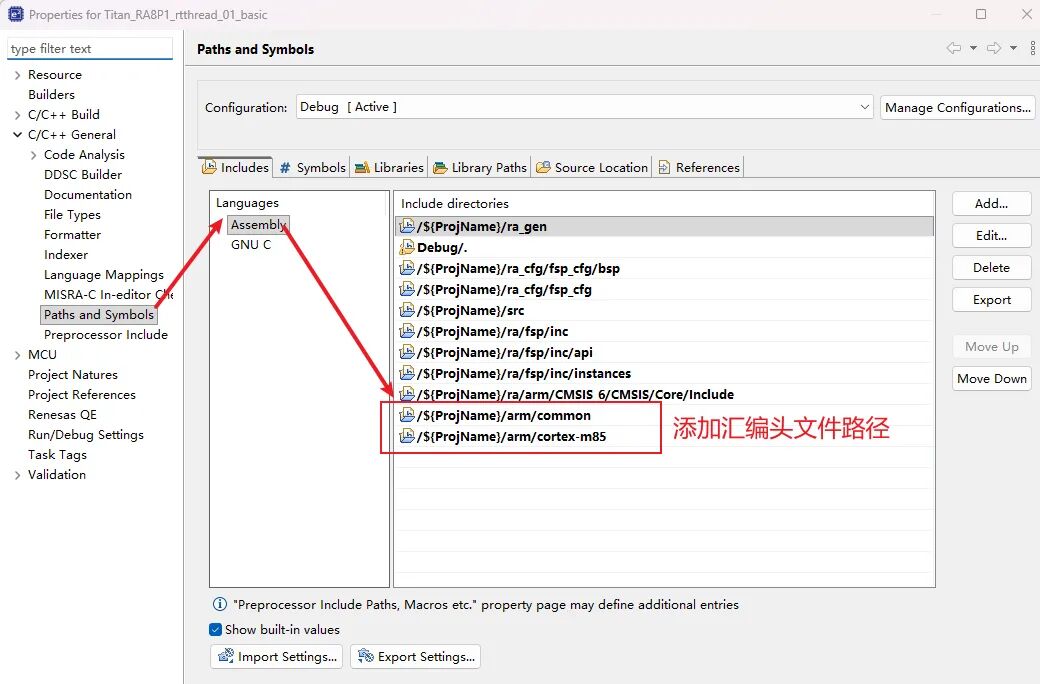
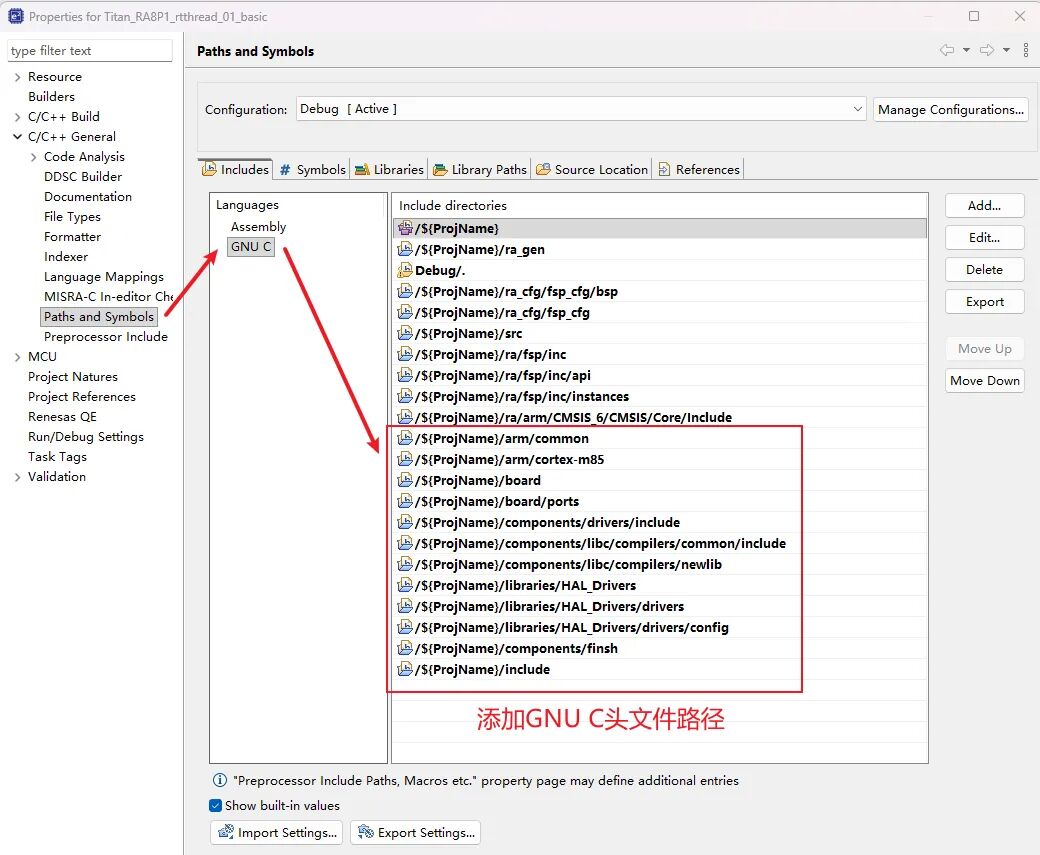
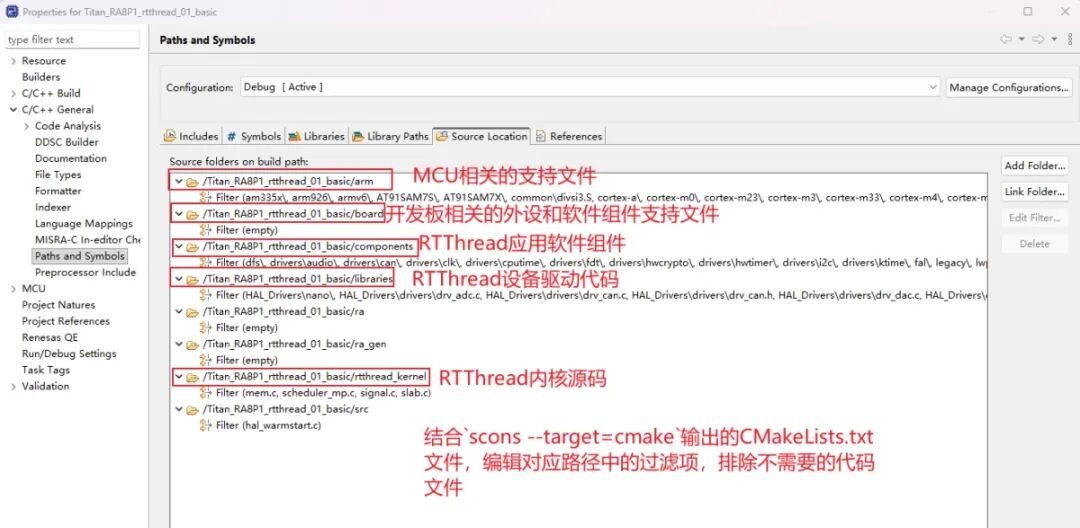
在工程属性的Path and Symbols中,设置工程的包含路径和源代码管理。首先在env控制台中运行scons --target=cmake获取CMakeList.txt文件,获取RT-Thread工程的编译信息,据此添加路径到Path and Symbols中。在Includes添加头文件路径,包括Assembly和GNU C两部分如下。
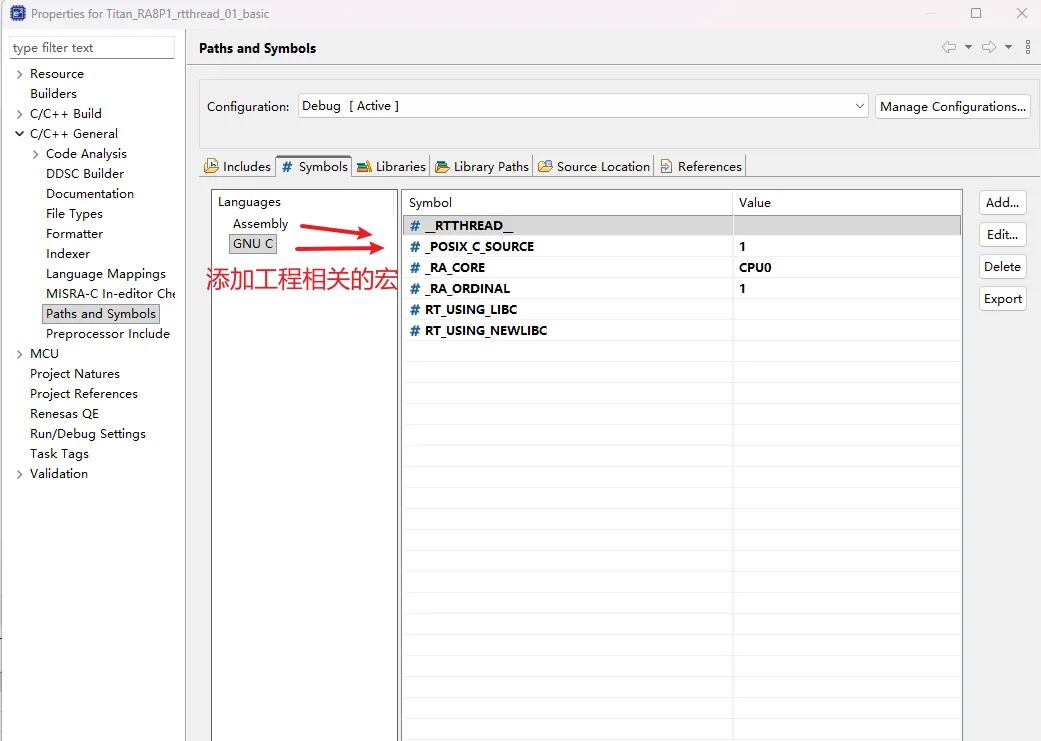
在Symbols选项卡中添加以下宏定义
在Source Location中添加.c源代码路径。结合CMakeList.txt文件中的Source文件管理,设置不同路径的Filter选项,将不需要的文件排除到工程的构建外。
e2studio工程的src文件夹中的hal_warmstart.c中的代码和RT-Thread提供的适配代码冲突,在源码控制中将其排除出构建即可。
修改ra\fsp\src\bsp\cmsis\Device\RENESAS\Source\startup.c中的Reset_Handler函数如下
voidReset_Handler(void){ /* Initialize system using BSP. */ SystemInit(); /* Call user application. */#ifdefined(__GNUC__) externintentry(void); entry();#elifdefined(__ICCARM__) externvoid__low_level_init(void); __low_level_init();#else /* Jump to main. */ main();#endif while(1) { /* Infinite Loop. */ }}
在hal_entry.c添加以下代码用于验证RT-Thread成功运行。
#include#include"hal_data.h"voidhal_entry(void){ rt_kprintf("\nHello RT-Thread!\n"); rt_kprintf("==================================================\n"); rt_kprintf("This example project is RTThread Template Test!\n"); rt_kprintf("==================================================\n"); while(1) { rt_thread_mdelay(500); }}
e2studio工程生成srcipt文件夹中的fsp.ld链接文件通过引用文件的形式链接Debug文件夹中的fsp_gen.ld和memory_regions.ld。复制两个文件中的内容到fsp.ld中。
文件中定位到MCU Vector Table位置,添加以下内容
/* MCU vector table */ __flash_vectors Base = .; _VECTORS = .; KEEP(*(.fixed_vectors)) KEEP(*(.application_vectors)) __flash_vectors$$Limit = .; /* section information for finsh shell */ . = ALIGN(4); __fsymtab_start = .; KEEP(*(FSymTab)) __fsymtab_end = .; . = ALIGN(4); __vsymtab_start = .; KEEP(*(VSymTab)) __vsymtab_end = .; /* section information for initial. */ . = ALIGN(4); __rt_init_start = .; KEEP(*(SORT(.rti_fn*))) __rt_init_end = .; . = ALIGN(4); KEEP(*(FalPartTable)) }> FLASH
另外定位到SDRAM区域具体可以参考工程中代码查看,添加以下内容
.ram.flat_nsc : { __sau_ddsc_RAM_NSC = .; }> RAM /* This symbol represents the end of user allocated RAM. The RAM after this symbol can be used at run time for things such as ThreadX memory pool allocations. */ __RAM_segment_used_end__ = ALIGN(__sau_ddsc_RAM_NSC ,4);
由于Titan-RA8P1使用的调试器是DAP固件,可以参考以下帖子在e2studio中使用PyOCD下载和调试程序。
https://club.rt-thread.org/ask/article/ee532d8d659ae45b.html
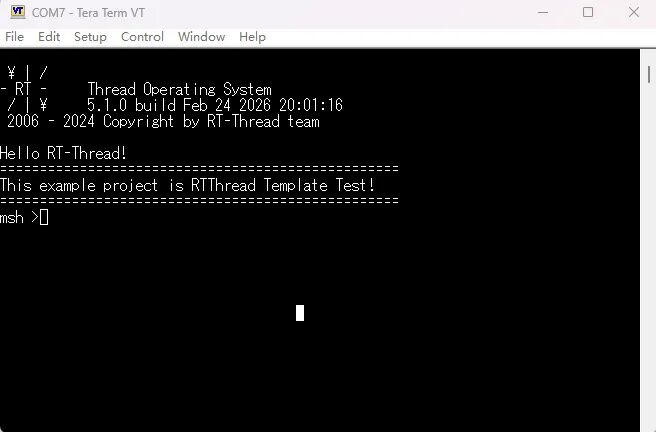
编译并下载后,通过串口获得如下输出,验证移植成功。
2.4 工程导出以及重命名导入
利用e2studio的工程导出功能将移植成功的RT-Thread工程导出作为模板工程,进行复用。
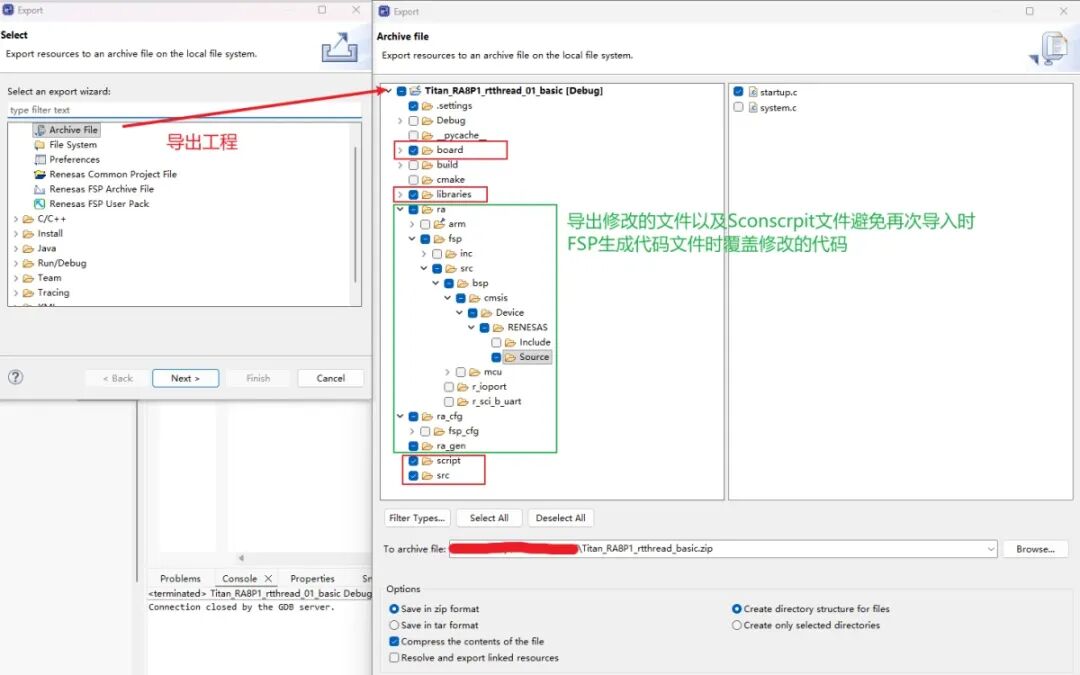
导出工程时,勾选ra、ra_gen、ra_cfg中的SConscript文件的作用是在导出的工程中保留这些文件夹,避免FSP代码生成工具生成代码时覆盖掉startup.c、fsp.ld等文件的改动。
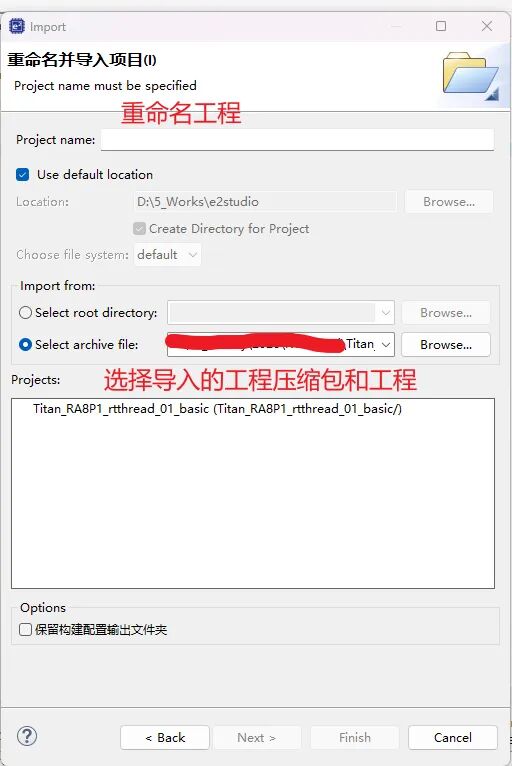
导入工程时,选择重命名并导入工程的选项。
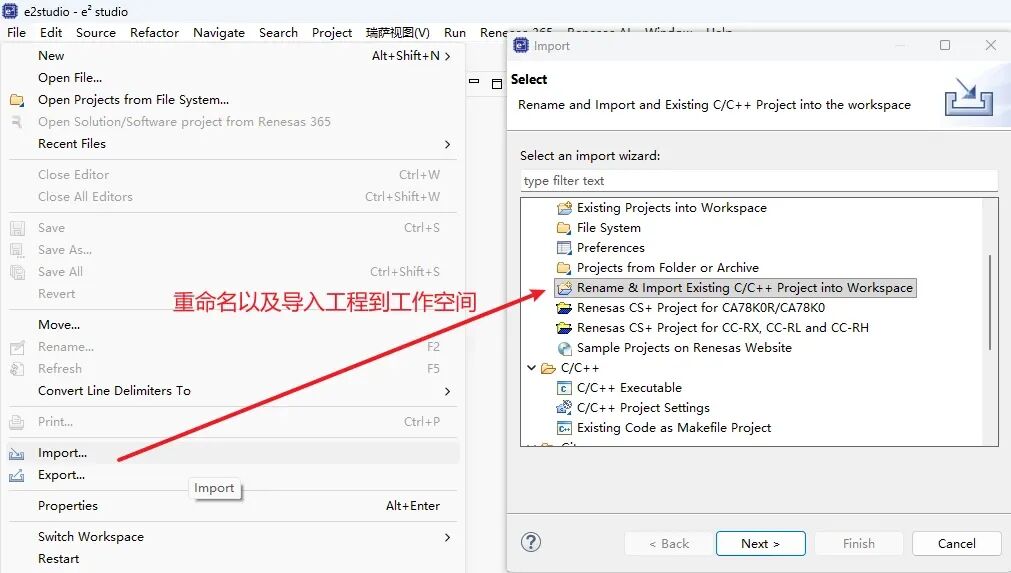
选择之前导出的工程压缩文件、重命名并导入即可利用模板工程进行开发。
3 添加HyperRAM
板载32MB的HyperRAM,MCU通过OSPI与其通讯。导入之前的模板工程。
3.1 FSP添加配置
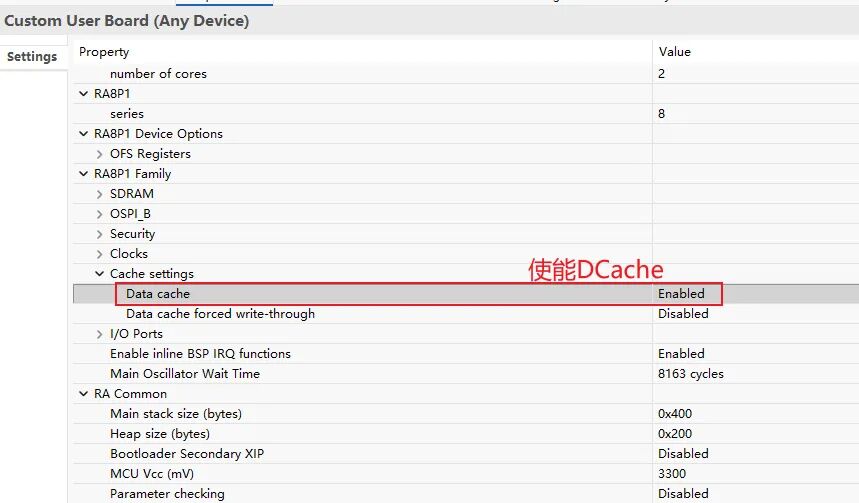
在FSP Configurator中修改设置,BSP选项卡中使能D-Cache,提高内存数据传输速率。
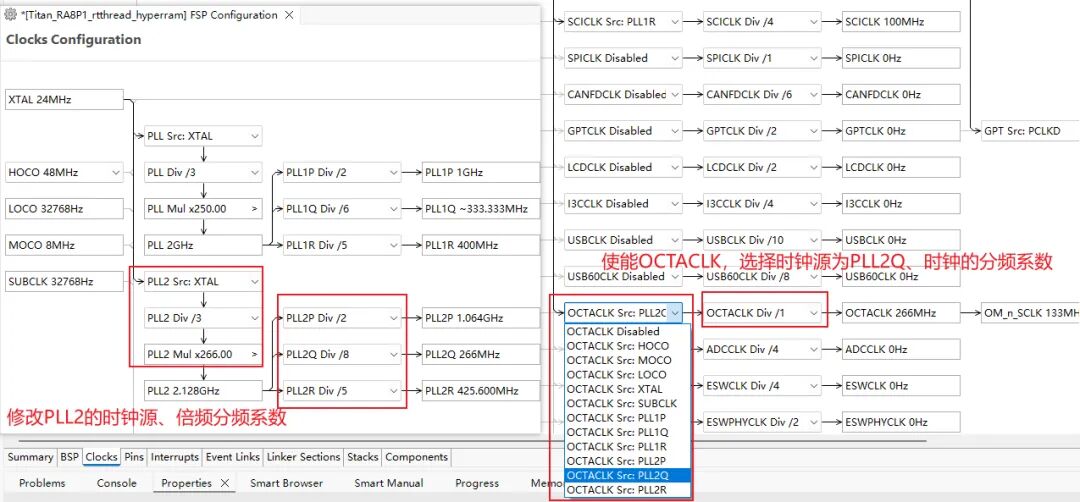
clocks界面中使能OCTACLK时钟。
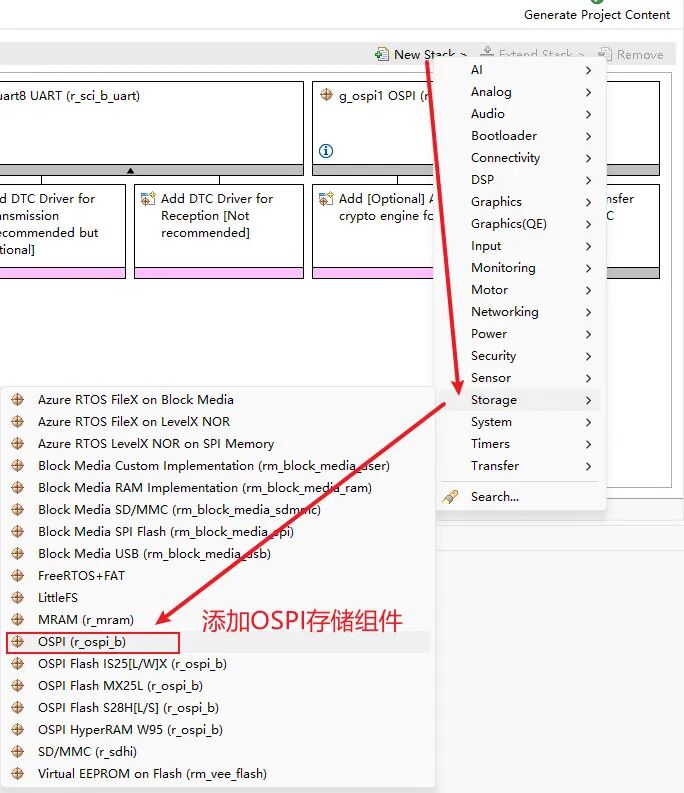
在Stacks选项卡中添加OSPI模块。
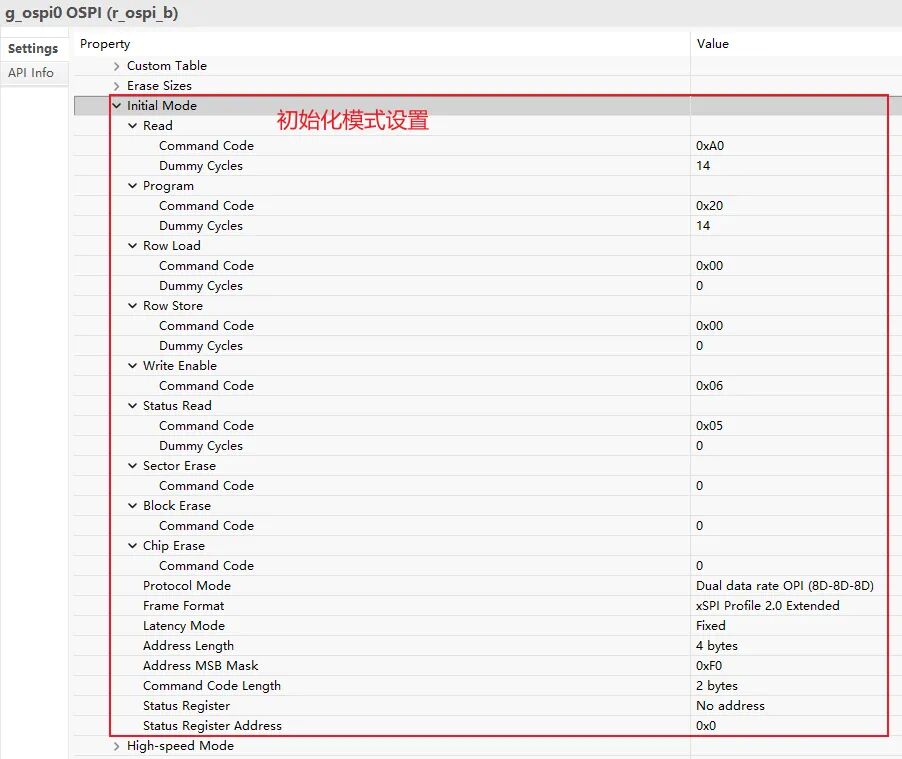
修改OSPI模块的参数如下。
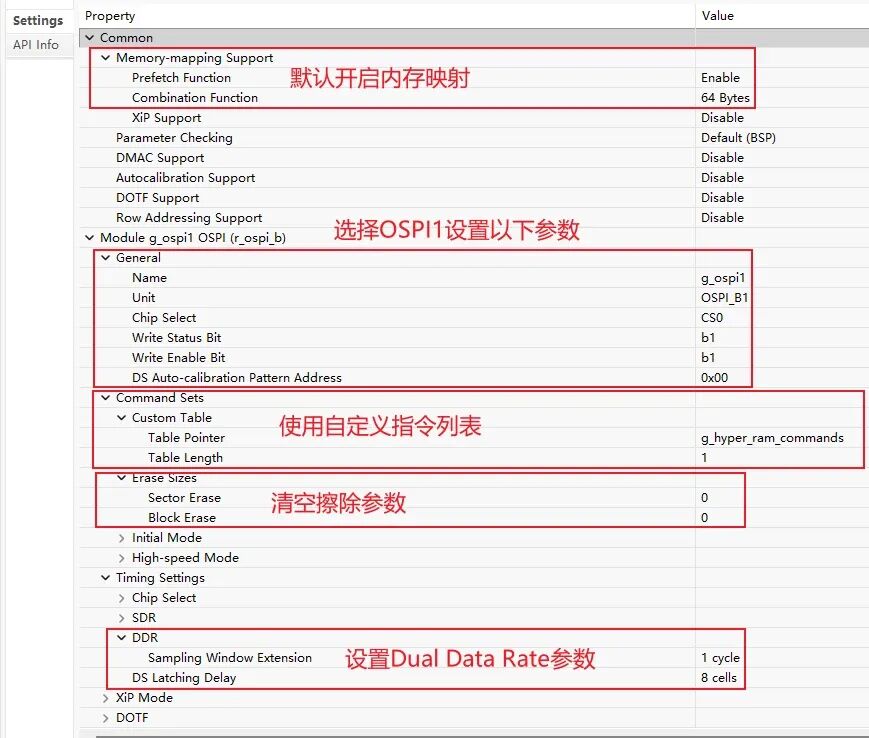

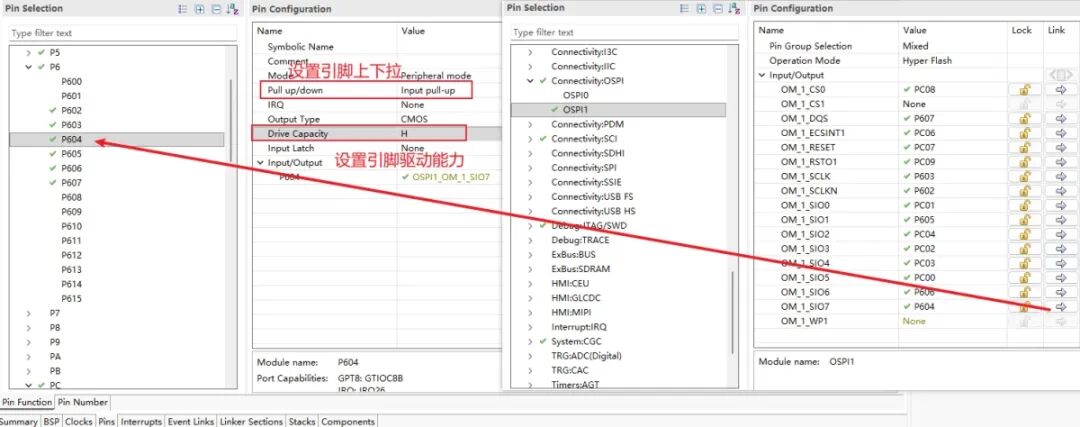
在Pins选项卡中设置OSPI外设的引脚,并修改其中数据引脚的驱动能力和上下拉设置。
保存并生成代码
3.2 添加HyperRAM驱动代码
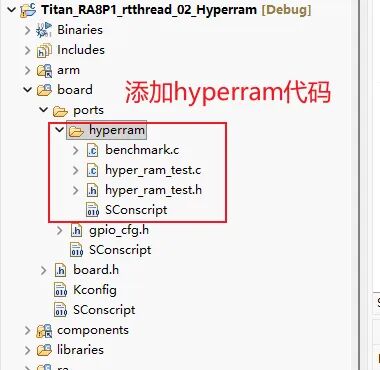
复制官方适配的HyperRAM驱动代码到board\ports目录中。
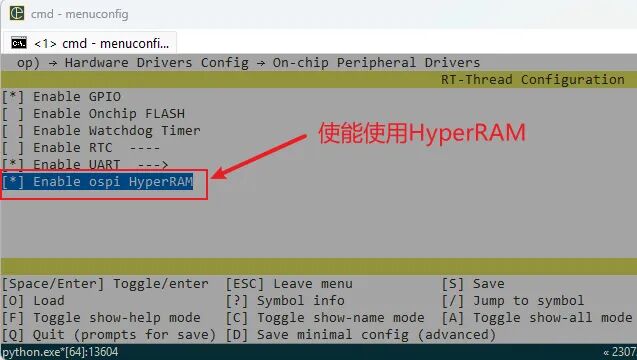
在board\Kconfig文件中添加HyperRAM配置项
menu"On-chip Peripheral Drivers" rsource"../libraries/HAL_Drivers/drivers/Kconfig" config BSP_USING_OSPI_RAM bool"Enable ospi HyperRAM" defaultn endmenu
env工具中进入menuconfig界面,确认其中使能HyperRAM,并保存配置。
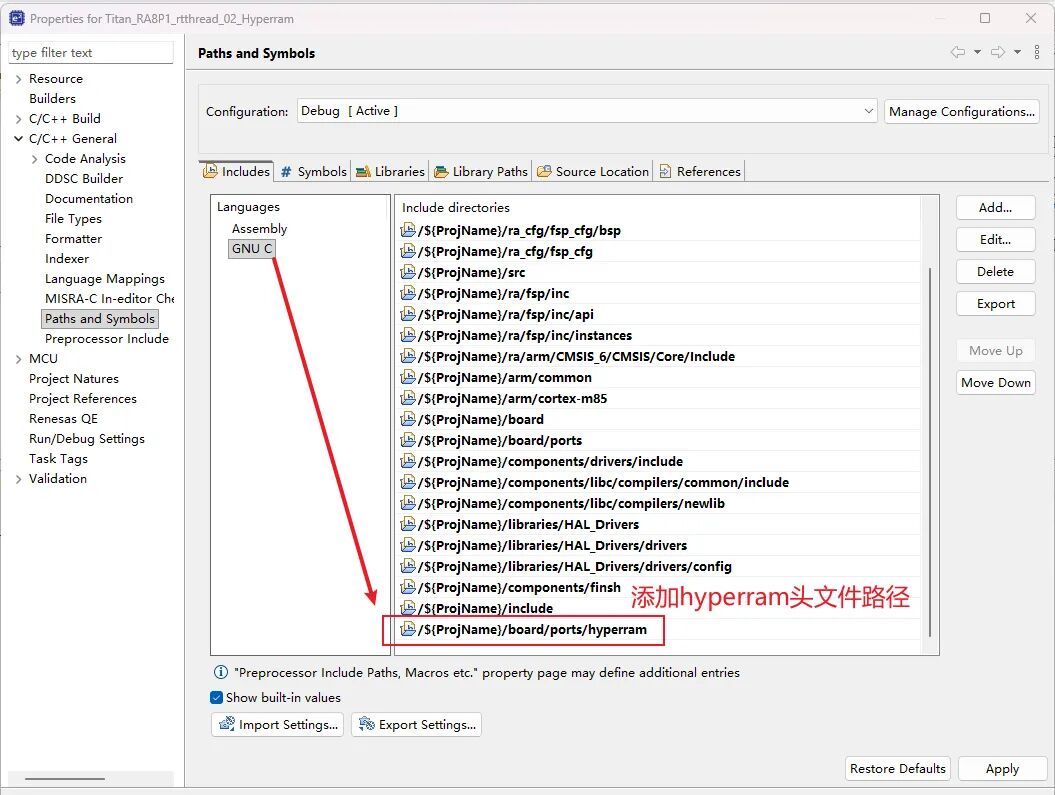
使用scons --target=cmake更新编译信息,根据其中的内容,修改工程的Path and Symbols,添加HyperRAM相关的头文件路径。
由于Source Location中添加board文件夹作为源代码索引,会自动包含Hyperram的代码,需要修改配置。
保存并编译,烧录工程到开发板运行。在串口控制台中输入help查看可用的指令。
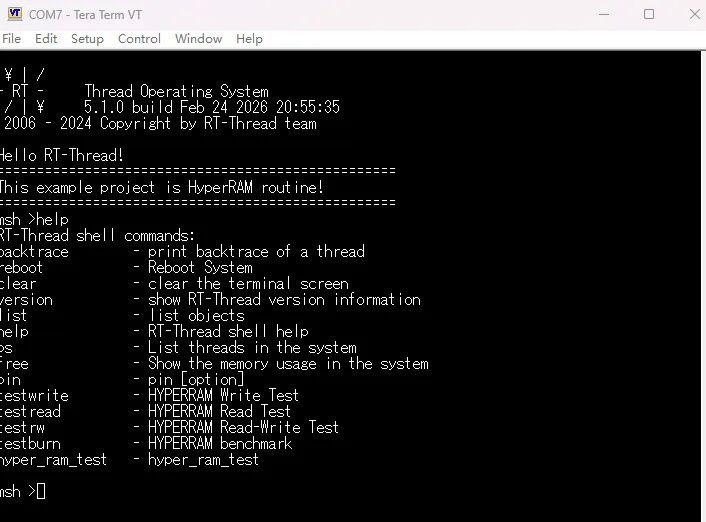
运行hyper_ram_test进行RAM读写测试,测试输出结果如下