 环贸财神
2026-01-25
环贸财神
2026-01-25
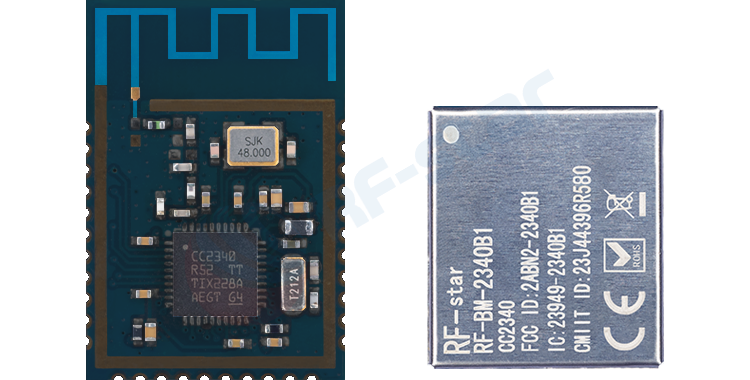
什么是低功耗蓝牙模块? 物理构成:低功耗蓝牙模块 = 蓝牙芯片 + 必要的外围电路(晶振、电容等) + 射频部分(天线匹配电路) + 屏蔽盖(防干扰)。这个完整封装让你无需处理复杂的射频设计,拿来就能用。 通俗理解:低功耗蓝牙(BLE)就像是普通蓝牙的“节能版”——它专门为需要长时间运行、电池供电的小设备设计。比如你的智能手环、电子秤、防丢器...
环贸财神
2025-12-26
睿擎派以瑞芯微 RK3506 为主控芯片,底层搭载 RT-Thread 操作系统,基于专为工业场景打造的睿擎工业平台进行开发。该平台是全栈自主可控的软硬件一体化解决方案,整合了数据采集、通信、控制、工业协议、AI、显示六大核心功能,精准适配工业应用需求。 官方仅提供了基于 CANOpen 协议(即 DS402 设备规范)操作伺服电机的示例代码,暂无 IO...
环贸财神
2025-12-20
选型不踩坑,适配多场景超省心TMCM-1640:紧凑型 BLDC 驱动模块 在 BLDC 电机控制项目中,“小巧不占地、性能够稳定、接口能适配” 是工程师选型时的核心诉求。今天要推荐的这款单轴 BLDC 控制器 / 驱动二合一模块,就精准踩中这些需求点,凭借紧凑设计与扎实配置,成为空间受限场景的优选方案 紧凑设计,空间受限场景福音 TMCM-1640...
环贸财神
2025-10-26
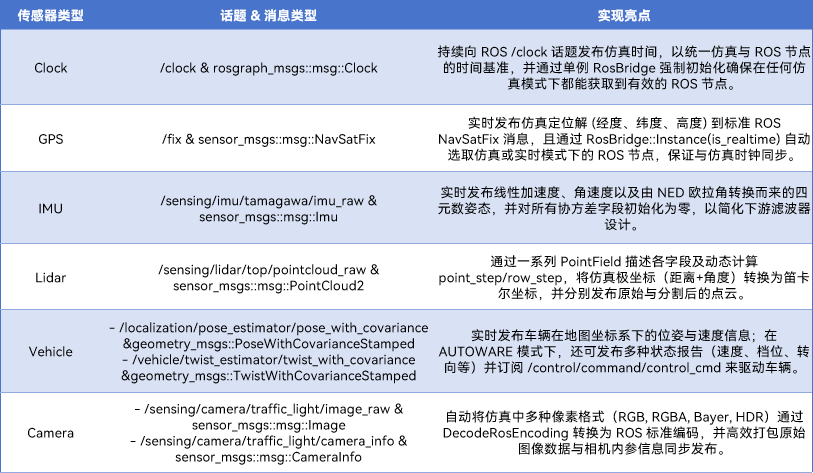
在自动驾驶与机器人仿真领域,传感器数据的高效交互是连接虚拟仿真与实际系统的关键纽带。ROS(Robot Operating System) 作为行业通用的机器人操作系统,其传感器数据交互机制直接影响仿真的真实性与系统集成的便捷性。 本文基于对aiSim 中各类 ROS 传感器(时钟、GPS、IMU、激光雷达、车辆、相机)模块的源码学习,梳理了它们的共性架构...
环贸财神
2025-10-14
即便使用高精度的UWB模块,很多用户仍会遇到定位误差超过预期的情况。市面上的大部分 UWB 产品都拥有“天线延迟”这一属性,它代表了 UWB 芯片发送数据时, 数据从芯片的 ANT 引脚传输至外部天线的时间间隔,或者数据被外部天线捕捉到,信号 传输至芯片的 ANT 引脚的时间间隔。要解决这一问题,首先需要理解 定位误差的来源。 UWB产品天线延迟:纳米级差...

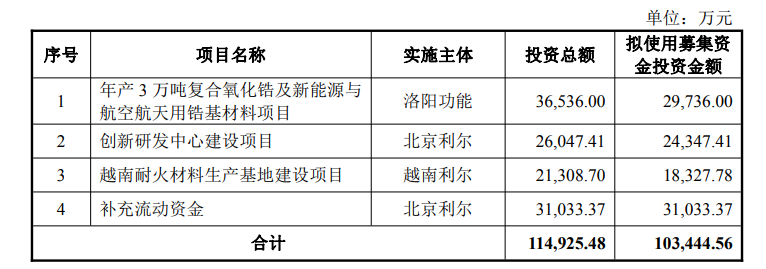
去年三季末应收账款逾30亿元,北京利尔拟定增不超10亿元“补血”,股价跌超8%
2026-01-30